Theory of Operation
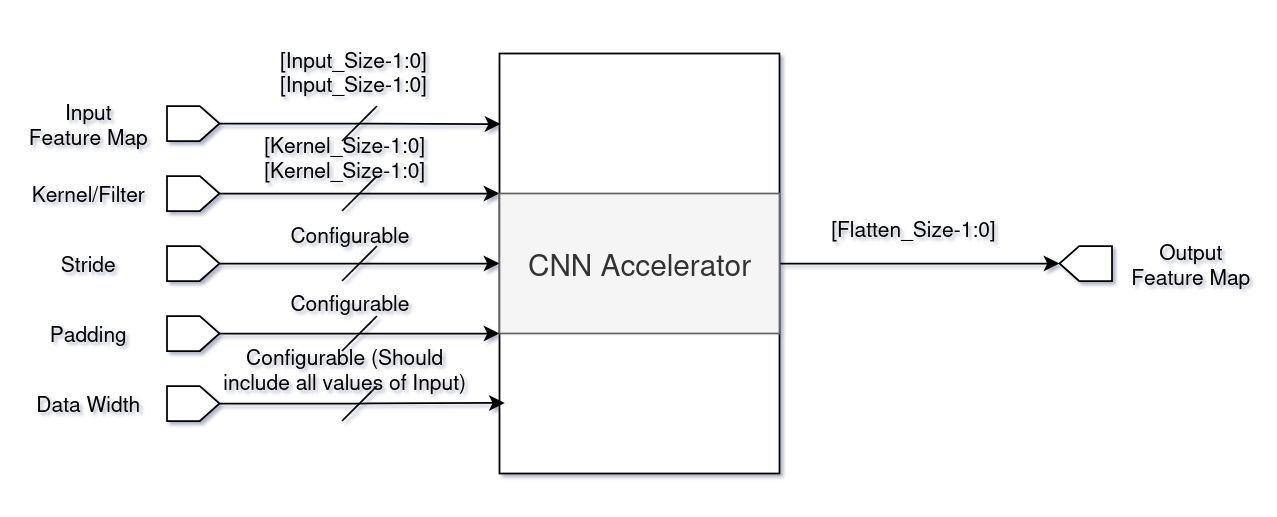
The CNN Accelerator is a hardware implementation of a convolutional neural network. It performs all major CNN operations in hardware, including convolution, activation, pooling, flattening, and classification. This enables low-latency inference on edge devices or FPGAs.
Data Flow
Input → Convolution + ReLU → MaxPooling → Flatten → GAP → Argmax → Output
- Input: The accelerator receives a multi-channel image or feature map, formatted in fixed-point or integer representation.
- Convolution + ReLU: Feature extraction via learned filters, followed by non-linear activation.
- MaxPooling: Downsamples feature maps while retaining the most important spatial features.
- Flatten: Converts 2D feature maps into a 1D vector for fully connected or global pooling layers.
- Global Average Pooling (GAP): Reduces each feature map to a single value, reducing the number of parameters.
- Argmax: Determines the class label corresponding to the highest probability.
- Output: The predicted classification result.
Architecture Overview
The system consists of modular, parameterized units, enabling reuse and scalability.
1. conv.sv – 2D Convolution + ReLU Activation
- Implements 2D convolution over multi-channel inputs with configurable kernel size, stride, and padding.
- Performs element-wise multiplication and accumulation (MAC) for each kernel.
- Applies ReLU activation, replacing negative values with zero.
- Hardware optimization: pipelined MAC operations and parallel kernels.
- Role: Extracts spatial features such as edges, textures, or patterns.
2. mac.sv – Multiply-Accumulate Unit
- Performs
sum += input × weight. - Optimized for fixed-point arithmetic.
- Supports parallel channels.
- Role: Core computation engine for convolution and pooling.
3. maxpool.sv – 2×2 Max Pooling
- Takes a 2×2 window of inputs and outputs the maximum value.
- Stride = 2, reducing feature map dimensions by half.
- Role: Downsampling and feature selection.
4. flatten.sv – Flattening Module
- Converts a 2D feature map into a 1D vector.
- Maintains channel and spatial order.
- Role: Prepares data for fully connected layers or GAP.
5. gap.sv – Global Average Pooling
- Computes the average of each feature map, collapsing H×W dimensions.
- Reduces parameters and prevents overfitting.
- Role: Provides global summary features for classification.
6. argmax.sv – Classification Output Logic
- Receives the output vector from GAP or fully connected layers.
- Compares all elements to find the index of the maximum value.
- Outputs this index as the predicted class label.
- Hardware: Comparator trees for efficiency.
- Role: Final decision-making stage.
Summary
The CNN Accelerator pipeline is designed for high-throughput, low-latency inference. Each module is modular, parameterized, and pipelined, enabling:
- Parallel computation
- Efficient resource utilization
- Flexibility to scale for larger CNN models
By combining convolution, activation, pooling, flattening, GAP, and argmax in hardware, the accelerator mirrors standard CNN processing while delivering the speed advantages of dedicated hardware.